Whole-body motor strategies for balancing on a beam when changing the number of available degrees of freedom
Researchers:
Enrico ChiovettoDescription:
Balancing on a beam is a highly challenging locomotion task, which can be associated with a verity of partly cognitive control strategies. The control of locomotion likely combines lower-level controlled based on motion primitives and high-level cognitive strategies. We are currently investigating how this behavior can be characterized, in terms of motion primitives, the sequencing of such primitives, as well as with respect to in more complex structured representations (strategies). An addition, we study how learning over multiple trials modifies the applied control strategies in this task. In order to investigate how the available degrees of freedom influence the control process we have developed a new paradigm where we study walking with additional mechanical constraints (e.g. constraining feet or the elbow joints), reducing the effectively available njumber of degrees of freedom. This constrains the possible strategies of maintaining balance.
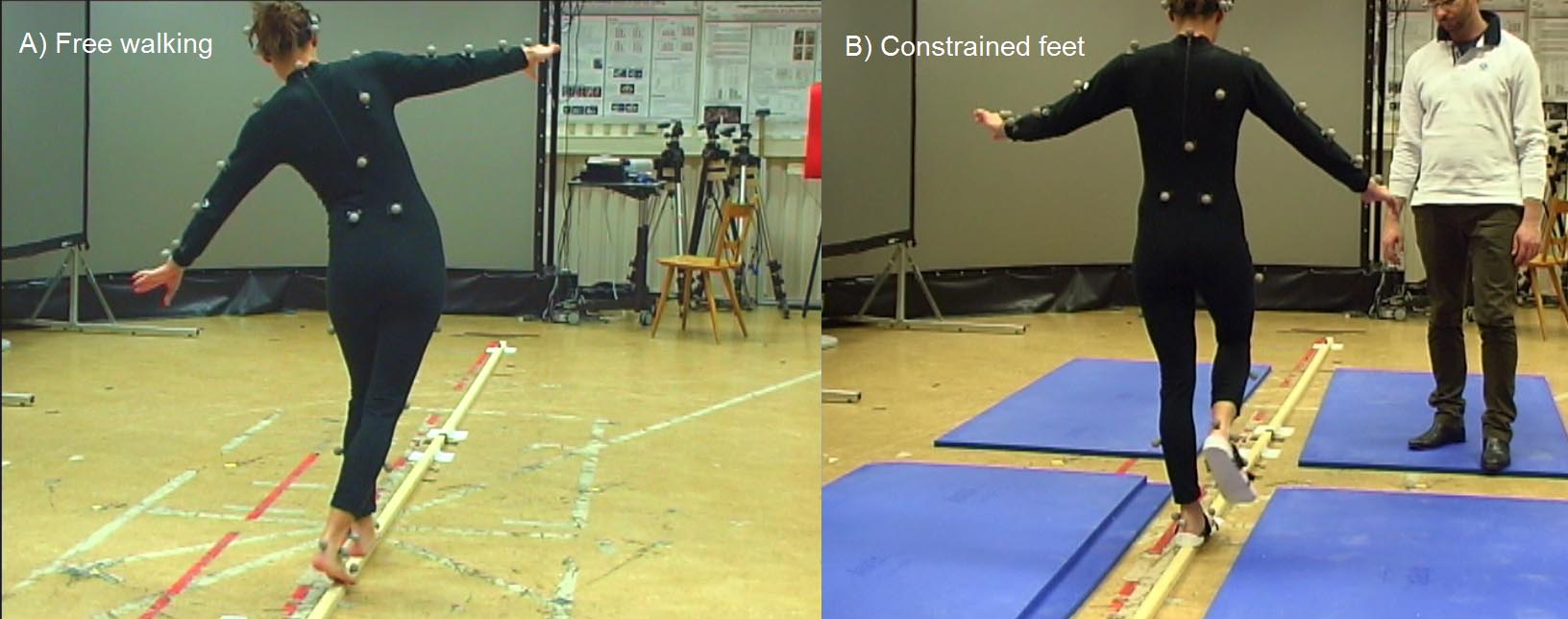
Caption: Participants walk on a narrow beam freely (A), or with additional constraints for different joint angles. (B) Participant is walking with rigid sandals that prevent movements of the toes and metatarsus).